Arduino com servomotor
Usando Arduino com servomotores, podemos controlar com precisão a posição do eixo, pois os servomotores funcionam em um mecanismo de feedback para determinar a posição do eixo. A posição do eixo é constantemente medida com um potenciômetro embutido dentro do servo motor que o compara com a posição alvo definida pelo microcontrolador (por exemplo, o Arduino). Ao calcular o erro entre a posição alvo e a posição real, o microcontrolador ajusta seu eixo de saída para combiná-lo com a posição alvo. Todo este sistema pode ser descrito como um sistema de circuito fechado .
O Arduino controla servo motores usando um sinal PWM. Este sinal de controle é dado ao pino de controle do servo motor. A largura do sinal PWM determina a posição do eixo. A tabela abaixo fornece uma ilustração do controle de posição do servo motor usando o sinal PWM
| Largura PWM (ms) | Posição do eixo (ângulo) |
|---|---|
| 1 ms | 0˚ grau Mín. |
| 1,5 ms | 90˚ graus Neutro |
| 2ms | 180˚ graus Máx. |
Os servomotores geralmente precisam de um pulso PWM a cada 20ms ou 50Hz. A maioria dos servomotores RC pode funcionar bem em uma faixa de 40 a 200Hz.
Pinos do Servo Motor
A maioria dos servomotores usados com Arduino tem três pinos.
- Chão Os servomotores possuem um pino GND que normalmente vem na cor preta.
- Pino de alimentação Um pino de 5v é necessário para fornecer energia ao servo motor. O pino de alimentação é geralmente na cor vermelha.
- Pino de controle O movimento do eixo do servo motor é controlado usando o pino de controle. Este pino está conectado a um pino digital Arduino.
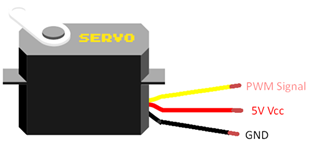
Os servomotores têm diferentes esquemas de cores disponíveis, mas a boa notícia é que todos os servomotores têm pinos geralmente na mesma ordem, apenas o código de cores é diferente.
Servo de fio com Arduino
A maioria dos servomotores funcionam em 5V. Para alimentar o servo com Arduino, precisamos conectar um pino de 5V do Arduino ao pino de alimentação do servo. O Arduino tem um alcance limitado para extrair corrente. Normalmente, um ou dois motores podem ser conectados ao Arduino. Para controlar vários servomotores usando Arduino, devemos alimentá-los usando uma fonte externa.
A seguinte configuração de pinos deve ser mantida em mente ao alimentar o servo:
| Pino do Servomotor | Pino do Arduino |
|---|---|
| Potência (vermelho) | Pino de 5V ou fonte de alimentação externa |
| Terra (preto ou marrom) | Fonte de alimentação e Arduino GND |
| Pino de controle (amarelo, laranja ou branco) | Pino digital do Arduino |
Para conectar servo motores com Arduino são possíveis duas configurações:
- Fio usando pino Arduino 5V
- Fio usando fonte externa com Arduino
Fio usando pino Arduino 5V
O servo motor pode ser ligado usando um pino de 5V do Arduino, mas uma coisa para ficar de olho é que o Arduino pode fornecer uma corrente máxima de 500mA ao servo. Se os motores consumirem corrente além desse limite, ele redefinirá o Arduino automaticamente e também poderá perder energia.
A seguir está a representação pictórica da conexão do Arduino com o servo motor:
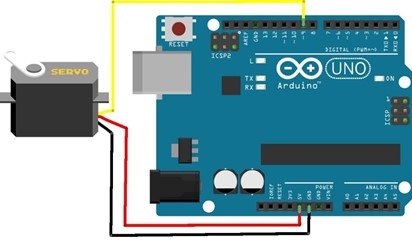
Aqui o pino digital 9 do Arduino é conectado ao pino de controle do servo motor, enquanto o pino de alimentação e GND do servo é conectado ao pino 5V e GND do Arduino, respectivamente.
Fio usando fonte externa com Arduino
O Arduino pode fornecer corrente limitada para servomotores, por isso precisamos conectar uma fonte de alimentação externa. Usando uma fonte de energia separada para servo motores, podemos conectar quantos motores quisermos com o Arduino, mas lembre-se dos pinos digitais disponíveis nas placas Arduino. Se você deseja conectar vários servomotores, é recomendável usar Arduino Mega ou Arduino shields que podem fornecer mais pinos para lidar com todos os motores.
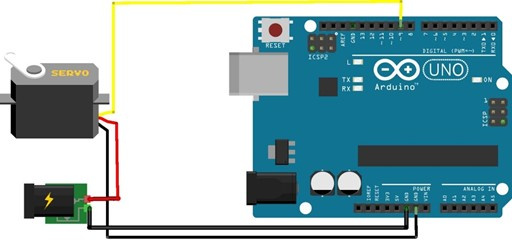
Aqui, a alimentação do servo motor e o pino de aterramento são conectados através dos pinos da fonte de alimentação externa, enquanto o pino de controle é conectado ao pino digital do Arduino, como na configuração acima.
Conclusão
Os servomotores são uma ótima maneira de projetar projetos de robótica. Devido à sua flexibilidade em relação aos mecanismos de controle, os usuários do Arduino têm a oportunidade de projetar projetos de sua escolha. Um servo motor pode ser conectado a um Arduino usando seus pinos de alimentação e digitais. Considerando que sempre procure os requisitos de energia do motor antes de conectá-lo ao Arduino. Para conectar os vários motores com o Arduino, você precisa usar uma fonte de alimentação externa.